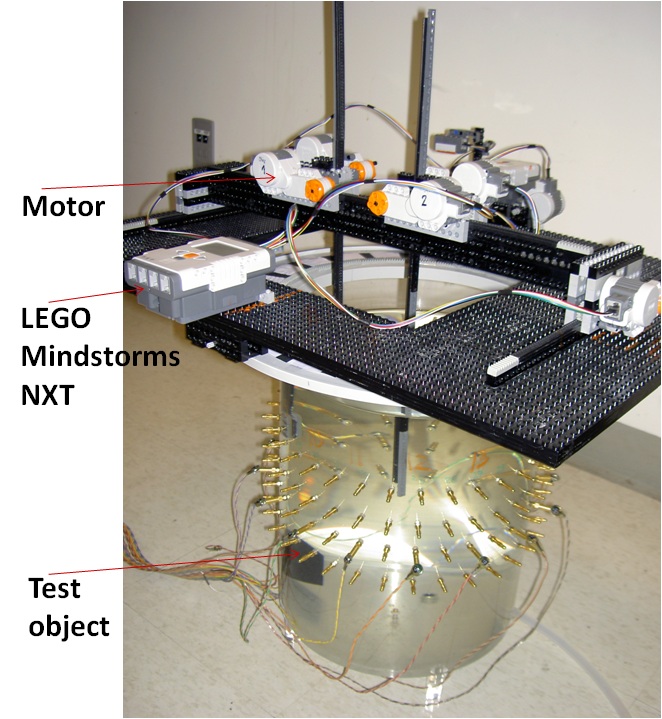
To precisely and reproducibly position test objects within the saline tank a position controller was constructed from standard LEGO parts in connection with a set of motors and two controllers (LEGO NXT Mindstorm). Two test objects could be positioned independently by a total of six position controllers, two for each of the X, Y and Z directions. In order to overcome the limitations in the range of motion imposed by the physical size of the LEGO parts the entire control unit rotates 360° on a plastic support placed on top of a cylindrical tank. The movement protocol was stored on a computer and transmitted to the position controllers via Bluetooth. A control program stores the coordinates and the position controller automatically moves the object to the desired locations.
Original work was done in 2009 by Sascha Reidt in Landquart, Switzerland. In 2012, Jonathan From updated the software, tests and documentation.
-
Y. Maimaitijiang, P.O. Gaggero, S. Böhm, and A. Adler, "Evaluation of EIT
system performance," submitted for Physiol. Meas. Dec. 2010.
- A PC running Windows XP/Vista/7 with bluetooth connection
- The lego™ pieces described in the construction documentation
- 2×Lego™ Mindstorms NXT controllers
| Files: | Description |
|---|---|
| Robot_Construction_Manual_EIT.pdf | Lego™ NXT based position controller construction manual |
| Phantom-Positioning-System_User_Guide.pdf | Software installation and tutorials |
| Robot_Construction_Documentation_DE.pdf | Project report for robot system (in German) |
| Position-Controller-PC-exe.zip | Position controller software (PC) − executable (Win32) |
| Position-Controller-PC-src.zip | Position controller software (PC) − source code |
| Position-Controller-NXT.zip | Position controller software (NXT) |
| Files (from 2009 release): | |
| Position-Controller-PC-exe-v1.0.zip | Position controller software (PC) − executable (Win32) |
| Position-Controller-PC-src-v1.0.zip | Position controller software (PC) − source code |
| Position-Controller-NXT-v1.0.zip | Position controller software (NXT) |
- Download the driver from http://mindstorms.lego.com/en-us/support/files/default.aspx#Driver
- If you need to change, reset or update the firmware, follow: http://mindstorms.lego.com/en-us/support/files/default.aspx#Firmware
- This compiler is not compatible with the new 1.29 firmware follow instructions: http://www.educatec.ch/doc/FAQ/FAQ.LEGO.M/NXT_Firmware_download?set_language=en&cl=en
- Open an explore window
- Go to the folder called WINNT or windows
- Go to the folder called system32
- Find the file called fantom.dll
- Right click on file and select properties
- Under the version tap, the file should have the following version number: 1.0.2.49152. If it has version number 1.0.1.49152 you need to update the USB driver.
Note: We recommend that the position controller be calibrated (initialized)
How to use the software to move the cubic object to a certain position

Figure: one-object protocol,

Figure: two-object protocol

Figure: Setting of COM port
number and time delay