|
|
EIDORS: Electrical Impedance Tomography and Diffuse Optical Tomography Reconstruction Software |
|
EIDORS
(mirror) Main Documentation Tutorials − Image Reconst − Data Structures − Applications − FEM Modelling − GREIT − Old tutorials − Workshop Download Contrib Data GREIT Browse Docs Browse SVN News Mailing list (archive) FAQ Developer
Hosted by |
Image reconstruction of moving objectsThese results are taken from the paper:
Sample DataSimulated data are calculated using the function simulate_2d_movement, which models a small (0.05×radius) object moving in a circle in a 2D circular tank. These data are available here.Since the temporal solver works best for noisy data, we simulate a fairly low SNR (high NSR). To understand why the temporal solver works best at for noisy data, consider that if data are clean, then there is no reason to look at data from the past/future, since the current measurement tells us everything we need to know.
% Sample Data $Id: temporal_solver01.m 3140 2012-06-09 10:55:15Z bgrychtol $
if ~exist('simulate_2d_movement_data.mat')
[vh,vi,xyr_pt]=simulate_2d_movement;
save simulate_2d_movement_data vi vh xyr_pt
else
load simulate_2d_movement_data
end
% Temporal solver works best at large Noise
nsr= 4.0; %Noise to Signal Ratio
signal = mean( abs(mean(vi,2) - vh) ); % remember to define signal
% Only add noise to vi. This is reasonable, since we have
% lots of data of vh to average to reduce noise
vi_n= vi + nsr*signal*randn( size(vi) );
Reconstruction AlgorithmsOver time steps, k, a sequence of difference vectors, yk = Jxk, are measured (assuming the body and electrode geometry, and thus J, stay fixed). If the conductivity of the body under investigation doesn�t change too rapidly, then it is reasonable to expect that a certain number of measurements, d, into the past and future provide useful information about the current image. Labelling the current instant as t, we therefore seek to estimate xt from data [yt-d; ... ; yt-1; yt; yt+1; ... ; yt+d]. In the subsequent sections we consider three traditional approaches and the proposed temporal inverse; each estimates xt at frame t from a sequence of data starting at frame 0, using the indicated data:
% Image reconstruction of moving objects $Id: temporal_solver02.m 4839 2015-03-30 07:44:50Z aadler $ time_steps= 3; time_weight= .8; base_model = mk_common_model( 'c2c2', 16 ); % 576 element base_model.fwd_model = mdl_normalize(base_model.fwd_model, 0); % HP value gives good solutions (calculated via Noise Figure) hp= sqrt(0.101046); % hp is squared base_model.hyperparameter.value= hp; % GN Solver imdl_GN = base_model; imdl_GN.RtR_prior= @prior_noser; imdl_GN.prior_noser.exponent= .5; imdl_GN.solve= @inv_solve_diff_GN_one_step; imdl_GN.hyperparameter.value= hp; imdl_GN.fwd_model = mdl_normalize(imdl_GN.fwd_model, 0); % Temporal Solver imdl_TS = base_model; imdl_TS.RtR_prior= @prior_time_smooth; imdl_TS.prior_time_smooth.space_prior= @prior_noser; imdl_TS.prior_noser.exponent= .5; imdl_TS.prior_time_smooth.time_weight= time_weight; imdl_TS.prior_time_smooth.time_steps= time_steps; imdl_TS.solve= @inv_solve_time_prior; imdl_TS.inv_solve_time_prior.time_steps= time_steps; % Kalman Solver imdl_KS = base_model; imdl_KS.RtR_prior= @prior_noser; imdl_KS.prior_noser.exponent= .5; imdl_KS.solve= @inv_solve_diff_kalman; Image ReconstructionWe reconstruct the image at 9 O'clock using each algorithm, using the code:% Image reconstruction of moving objects $Id: temporal_solver03.m 3346 2012-07-01 21:30:55Z bgrychtol $
image_select= length(xyr_pt)/2+1;; % this image is at 9 O'Clock
time_steps= 3; ts_expand= 5;
time_weight= .8;
ts_vec= -time_steps:time_steps;
% vi_sel is the inhomog data used by the algorithm
% sel is the image to show (ie. last for kalman, middle for temporal)
for alg=1:4
if alg==1; % GN Solver
im_sel = image_select;
vi_sel = vi_n(:,im_sel);
sel = 1;
imdl= imdl_GN;
elseif alg==2 % Weighted GN Solver
im_sel= image_select+ ts_vec*ts_expand;
weight= (time_weight.^abs(ts_vec));
vi_sel= vi_n(:,im_sel) * weight(:) / sum(weight);
sel = 1;
imdl= imdl_GN;
elseif alg==3 % Temporal Solver
im_sel= image_select+ ts_vec*ts_expand;
vi_sel= vi_n(:,im_sel);
sel = 1 + time_steps; % choose the middle
imdl= imdl_TS;
elseif alg==4 % Kalman Solver
im_sel= image_select+ (-12:0)*ts_expand; %let Kalman warm up
vi_sel= vi_n(:,im_sel);
sel = length(im_sel); % choose the last
imdl= imdl_KS;
end
imdl.fwd_model = mdl_normalize(imdl.fwd_model, 0);
img= inv_solve( imdl, vh, vi_sel);
% only show image for sel (ie. last for kalman, middle for temporal)
img.elem_data= img.elem_data(:,sel);
show_fem(img);
axis equal
axis([-1.1, 0.1, -1.1, 1.1]);
set(gca,{'XTicklabel','YTicklabel'},{'',''});
%
% Put circles where the data points used for reconstruction are
%
theta= linspace(0,2*pi,length(xyr_pt)/ts_expand);
xr= cos(theta); yr= sin(theta);
xpos= xyr_pt(1,im_sel); ypos= xyr_pt(2,im_sel);
rad= xyr_pt(3,im_sel);
hold on;
for i=1:length(xpos)
hh= plot(rad(i)*xr+ xpos(i),rad(i)*yr+ ypos(i));
set(hh,'LineWidth',3,'Color',[0,0,0]);
end
hold off;
print_convert(sprintf('temporal_solver03%c.png',96+alg));
end % for i
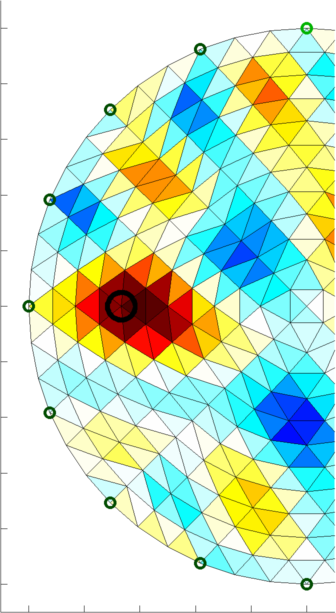
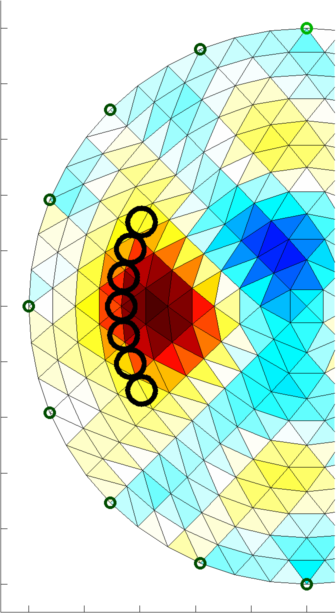
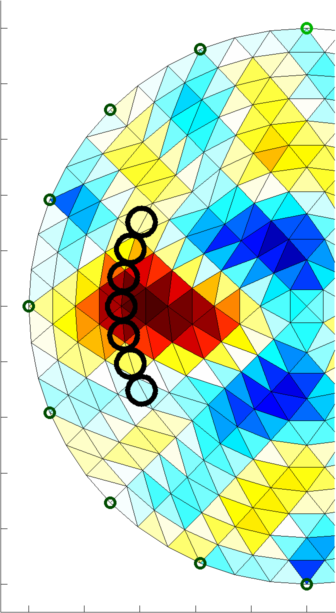
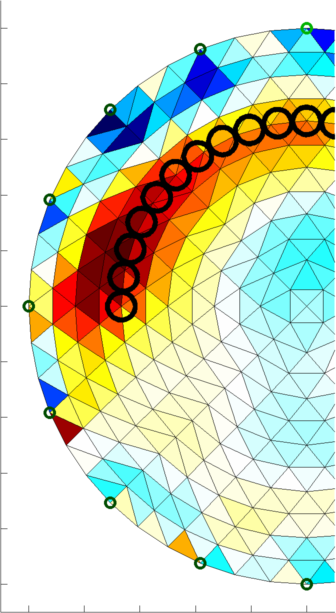
Figure: Image reconstructions of a moving ball in a medium. Top: using a classic one-stop solver, Bottom: using a Kalman solver. Note the warm up period of the Kalman images when the time correlations are being trained. Image Reconstruction MoviesIn order to show animated movies of temporal solvers, we can do the following
% Image reconstruction of moving objects $Id: temporal_solver04.m 1535 2008-07-26 15:36:27Z aadler $
time_steps= 3; ts_expand= 5;
time_weight= .8;
ts_vec= -time_steps:time_steps;
image_select= .25*length(xyr_pt)+1:ts_expand:.75*length(xyr_pt)+1;
% GN Solver
vi_sel = vi(:,image_select);
img= inv_solve( imdl_GN, vh, vi_sel);
animate_reconstructions('temporal_solver04a', img);
% Temporal Solver
k=1;
for i= image_select
vi_sel= vi(:,i+ts_vec);
imgs= inv_solve( imdl_TS, vh, vi_sel);
img.elem_data(:,k)= imgs.elem_data(:,1+time_steps);
k=k+1;
end
animate_reconstructions('temporal_solver04c', img);
% Kalman Solver
vi_sel = vi(:,image_select);
img= inv_solve( imdl_KS, vh, vi_sel);
animate_reconstructions('temporal_solver04d', img);
Output images are:
−Gauss-Newton solver −Temporal solver −Kalman solver |
Last Modified: $Date: 2017-02-28 13:12:08 -0500 (Tue, 28 Feb 2017) $ by $Author: aadler $
{kind=link}
{kind=link}
{kind=link}